سنسور فاصله سنج اولتراسونیک SRF-04 / SRF-05
سنسور SRF04 یک سنسور فاصله الکترونیکی ultrasonic است که برای اندازهگیری فواصل و حساب کردن موقعیت اشیاء از فاصلههای نزدیک تا دور استفاده میشود.

معرفی
سنسور SRF04 یک سنسور فاصله الکترونیکی ultrasonic است که برای اندازهگیری فواصل و حساب کردن موقعیت اشیاء از فاصلههای نزدیک تا دور استفاده میشود. این سنسور از مبدلهای فرکانس فراصوت برای ارسال پالسهای صوتی به اشیاء و دریافت سیگنالهای بازتابی استفاده میکند، و سپس با توجه به زمانی که از فرستادن تا دریافت سیگنال برگشتی طول میکشد، فاصله را محاسبه میکند. SRF04 دارای دو پایه اصلی برای اتصال به میکروکنترلرها یا سیستمهای الکترونیکی است.
راه اندازی
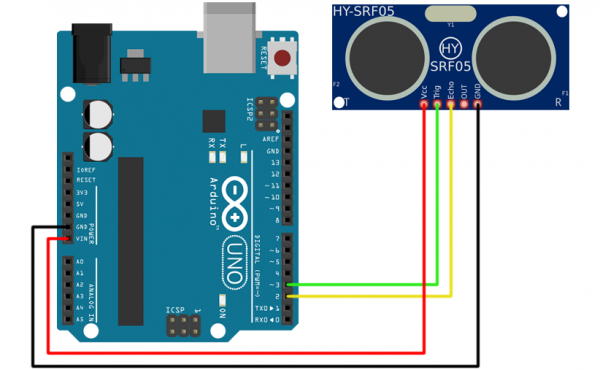
- سنسور را طبق تصویر زیر به آردوینو متصل کنید.
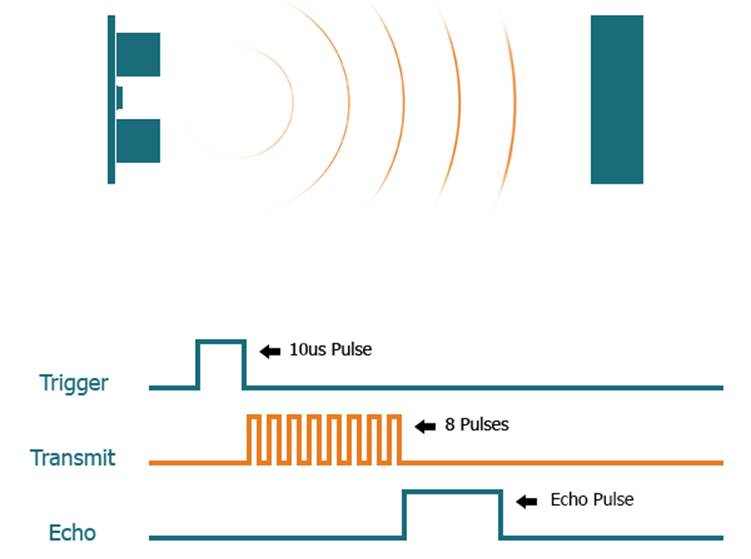
- اساس کار این سنسور به این صورت است که ابتدا به مدت 10 میکروثانیه پایه Trigger را 1 کرده و سپس 0 میکنیم. سنسور با دریافت این پالس از طریق فرستنده خود موج فراصوت را ارسال و بازتاب آن را دریافت کرده و با اندازه گیری مدت زمان رفت و برگشت فاصله تا جسم روبرو را میسنجد. سپس یک پالس در پایه Echo به آردوینو ارسال میکند و با اندازه گیری مدت زمان این پالس (عرض پالس) و ضرب آن در یک ضریب ثابت میتوان فاصله اندازه گیری شده را بر حسب سانتیمتر بدست آورد.
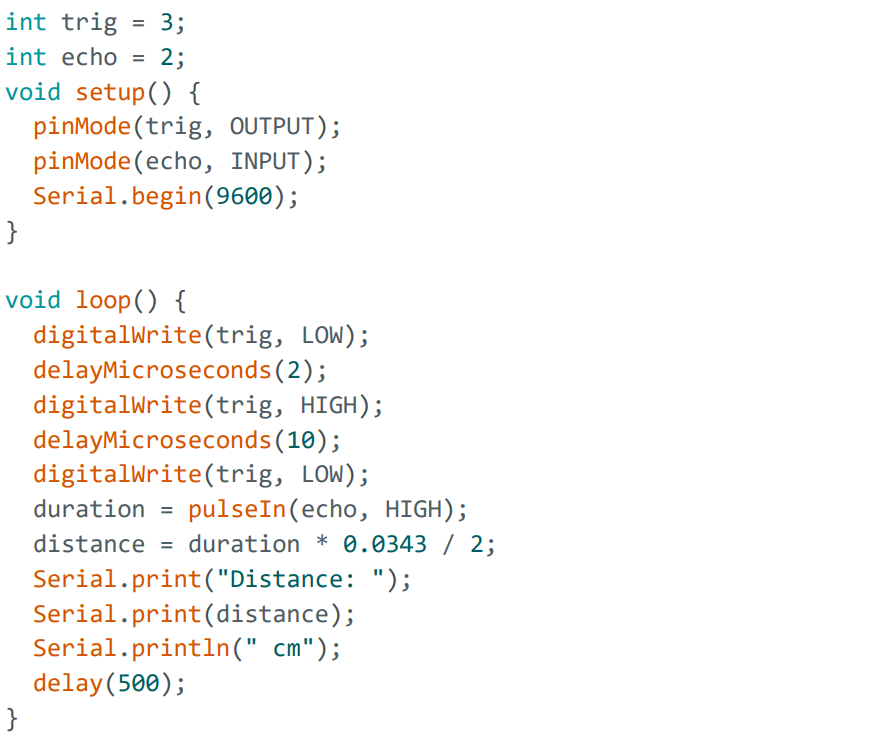
- در نرم افزار آردوینو ابتدا پایه Trigger و Echo را به ترتیب روی حالت خروجی و ورودی تنظیم میکنیم. در اینجا برای نمایش فاصله اندازه گیری شده از ارتباط سریال استفاده میشود. در برنامه زیر تابع Serial.begin(9600) ارتباط سریال را آغاز کرده و سرعت انتقال دیتا را روی 9600 بیت بر ثانیه تنظیم میکند. سپس در تابع loop پالس 10 میکروثانیه را ارسال و پالس Echo را با تابع pulseIn(echo, HIGH) اندازه گیری میکنیم. سپس این عدد را در یک ضریب ثابت ضرب کرده و فاصله را بر حسب سانتیمتر بدست میآوریم. در نهایت با استفاده از ارتباط سریال مقدار اندازه گیری شده را به کامپیوتر ارسال میکنیم.
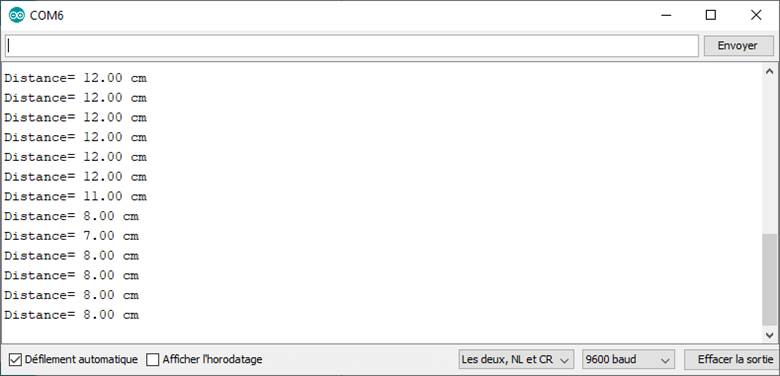
- در نهایت با کلیدهای ctrl+shift+m میتوان Serial Monitor را باز کرده و نتیجه را مشاهده نمود.
Powered by Froala Editor