راه اندازی درایور موتور L298
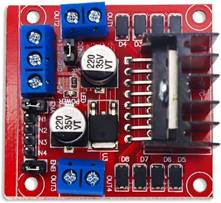
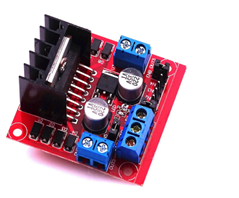
ماژول درایور L298 یک ماژول قدرتمند برای کنترل موتورها و سایر بارهای الکتریکی است. این ماژول از تراشه L298 مشهور استفاده میکند که یک درایور دو جهته (Bidirectional) با جریان بالا برای موتورها و بارهای الکتریکی است. این درایور قابلیت کنترل دو موتور DC یا یک موتور استپر را فراهم میکند.

معرفی
ماژول درایور L298 یک ماژول قدرتمند برای کنترل موتورها و سایر بارهای الکتریکی است. این ماژول از تراشه L298 مشهور استفاده میکند که یک درایور دو جهته (Bidirectional) با جریان بالا برای موتورها و بارهای الکتریکی است. این درایور قابلیت کنترل دو موتور DC یا یک موتور استپر را فراهم میکند. ماژول L298 دارای ورودی و خروجیهای متعددی است که امکان اتصال به میکروکنترلرها یا سایر سیگنالهای کنترلی را فراهم میکند. علاوه بر این، این ماژول دارای پایههای تغذیه جداگانه برای منابع تغذیه موتورها و منبع تغذیه منطقی (میکروکنترلر) است که اجازه میدهد بارهای با توان بالا را به طور مجزا از مدار منطقی کنترل کنید. مهمترین ویژگی این ماژول قابلیت کنترل دو جهت حرکت موتورها است، که این امکان را فراهم میکند که موتورها را به جلو و عقب حرکت داده و سرعت آنها را تغییر دهید. همچنین، L298 دارای قابلیت حفاظت در برابر جریان بالا، ولتاژ اضافی و دمای بالا است که از ایجاد خرابی در مدار و موتورها جلوگیری میکند. به علت ویژگیهای قابل توجه و کاربردهای گستردهای که دارد، ماژول L298 در انواعی از پروژههای رباتیک، اتوماسیون صنعتی، خودروهای الکتریکی و دیگر برنامههای الکترونیکی مورد استفاده قرار میگیرد.
راه اندازی
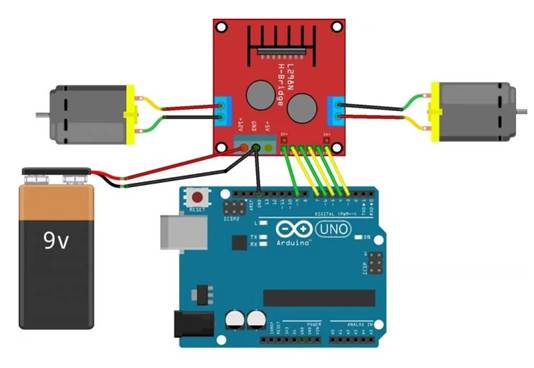
- جهت کنترل دو موتور به صورت همزمان مدار زیر را با ببندید.

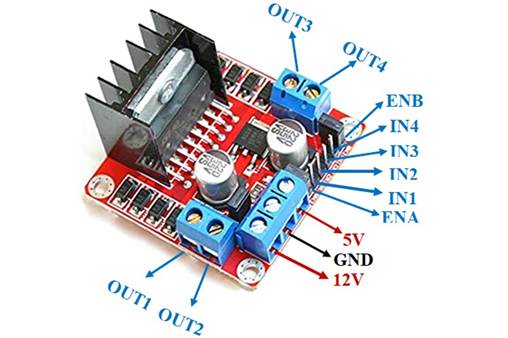
- با توجه به تصویر زیر موتور ها به out1, out2, out3, out4 که در دوطرف ماژول هستند وصل میشود. سوکتهای آبی رنگ که با نام ترمینال فونیکس معروف هستند، برای اتصال سیم استفاده میشوند. ترمینال فونیکس 3 پایه نیز جهت اتصال تغذیه یا باتری است. پایه های کنترلی برای هر موتور شامل یک EN و دو IN است. پایه EN جهت کنترل سرعت موتور و دو پایه IN نیز برای کنترل جهت چرخش استفاده میگردد. پایه های EN معمولا با یک جامپر به 5v متصل است که باعث میشود موتور با حداکثر سرعت خود بچرخد.
- پس از اتصال موتور به آردوینو کافی است پایه های مورد نظر را روی حالت خروجی (OUTPUT) تنظیم نموده و برای کنترل جهت موتور این پایهها را 0 یا 1 کنیم. در این برنامه موتور 1 که به پایه های کنترلی آن به ترتیب 1 و 0 داده شده در یک جهت و موتور دو که به آن 0 و 1 داده شده در جهت عکس میچرخد. همچنین اگر 0 و 0 یا 1 و 1 به پایه های کنترلی داده شود موتور خاموش میشود.

- برنامه بالا تنها جهت چرخش موتور را مشخص میکند. برای کنترل سرعت موتور باید پایه های EN را نیز به یکی از پایه های آردوینو که با علامت ~ مشخص شده وصل کنیم. به عنوان مثال در شکل زیر پایه های EN به پایههای 3 و 9 از آردوینو متصل شده. و پایههای کنترل جهت نیز به ترتیب به 4، 5، 6 و 7 متصل است.
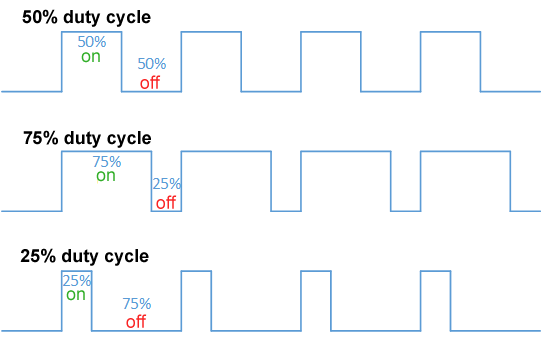
- برای کنترل سرعت موتور کافی است به پایه EN یک پالس PWM بدهیم. به عبارت دیگر پایه EN را با سرعت زیاد خاموش و روشن میکنیم و این موجب خاموش و روشن شدن موتور شده و با کنترل مدت زمان خاموش و مدت زمان روشن بودن موتور میتوان سرعت آن را کنترل کرد. اساس کار PWM (مدلاسیون عرض پالس) به صورت زیر است و مقدار آن میتواند از 0 تا 255 باشد.
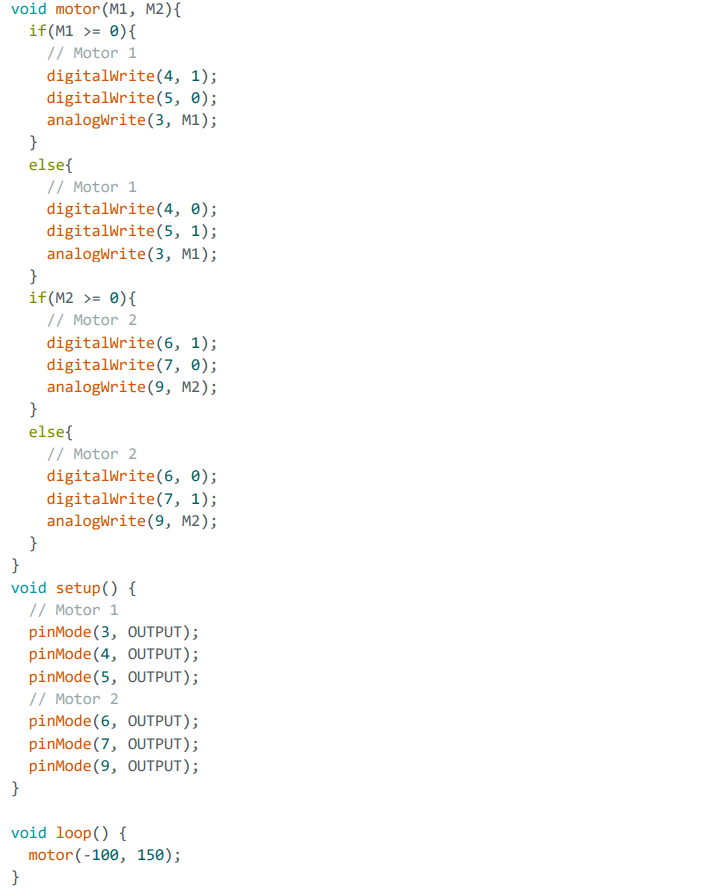
- برنامه کنترل سرعت موتور به صورت زیر میباشد که در آن یک تابع به نام motor تعریف شده و سرعت دو موتور را به عنوان ورودی دریافت کرده و دستورات لازم را اجرا میکند. جهت سرعت نیز با علامت قابل تعیین است. بنابراین سرعت هر موتور عددی از -255 تا +255 میباشد.
Powered by Froala Editor