راه اندازی موتور سروو Servo motor
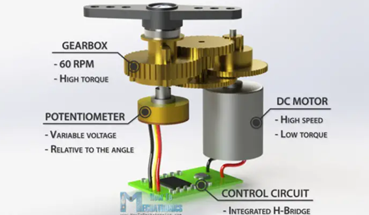
سروموتور (Servo Motor) یک نوع موتور الکتریکی است که به طور خاص برای کنترل دقیق موقعیت و زاویه یک سازه یا قطعه مکانیکی استفاده میشود. این موتورها معمولاً شامل یک مکانیزم داخلی قوی با بازده بالا برای تحریک موقعیت دقیق میشوند. سروموتورها دارای سه پایه مرتبط با منبع تغذیه، زمین و سیگنال هستند.

معرفی
سروموتور (Servo Motor) یک نوع موتور الکتریکی است که به طور خاص برای کنترل دقیق موقعیت و زاویه یک سازه یا قطعه مکانیکی استفاده میشود. این موتورها معمولاً شامل یک مکانیزم داخلی قوی با بازده بالا برای تحریک موقعیت دقیق میشوند. سروموتورها دارای سه پایه مرتبط با منبع تغذیه، زمین و سیگنال هستند. پایه تغذیه به منبع تغذیه متصل میشود (معمولاً بین ۴.۸ تا ۶ ولت)، پایه زمین به منبع زمین متصل میشود و پایه سیگنال به یک پین سیگنالی میکروکنترلر متصل میشود. با اعمال سیگنال به پایه سیگنال، سروموتور به موقعیت دقیقی تغییر مییابد. با توجه به سیگنال متقاضی، سروموتور به زاویه دلخواهی در محدوده ۰ تا ۱۸۰ درجه حرکت میکند. برای کنترل دقیق موقعیت، اغلب از PWM (Modulation Width Modulation) استفاده میشود که این امکان را فراهم میکند که زمان پالسهای ورودی تغییر کند و سروموتور به موقعیت دقیقی حرکت کند.

راه اندازی
- ابتدا مدار زیر را ببندید. پایه سیگنال سروو موتور را میتوان به پایه هایی از آردوینو که علامت ~ دارند متصل نمود.

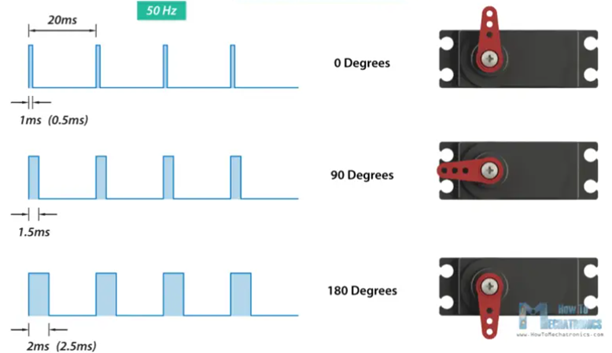
- برای کنترل زاویه موتور باید به صورت زیر یک سیگنال پالس مربعی برای آن بفرستیم. عرض این پالس (مدت زمان روشن بودن) زاویه موتور را مشخص میکند. اگر مدت زمان روشن بودن به اندازه 2 میلی ثانیه باشد سروو در زاویه 180 درجه و اگر 1 میلی ثانیه باشد موتور به وضعیت 0 درجه میرود.
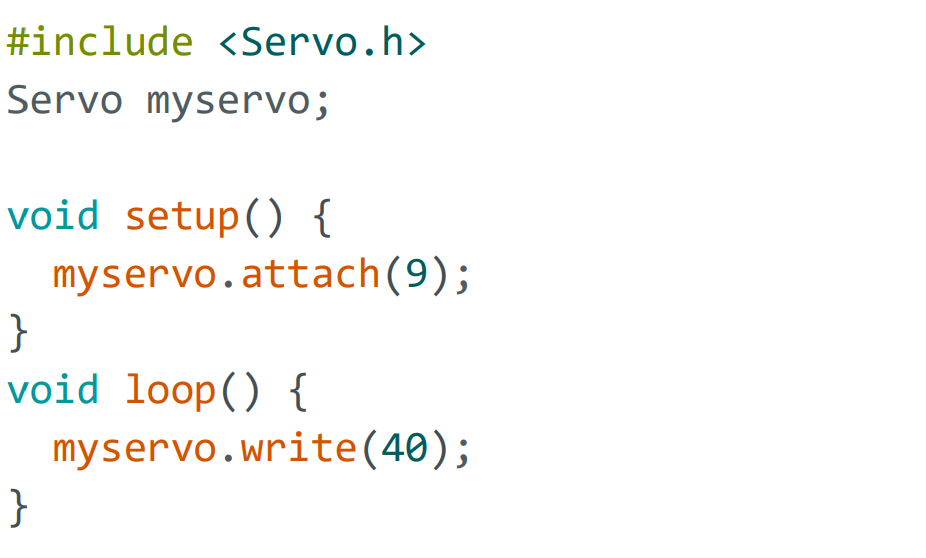
- برنامه زیر را در آردوینو بنویسید و زاویه سروو موتور را تغییر دهید. در این برنامه از کتابخانه Servo.h استفاده میشود. با استفاده از تابع myservo.attach(9) شماره پایه ای که سروو را به آن وصل کردیم مشخص میکنیم. سپس در حلقه loop برنامه با دستور myservo.write(40) زاویه موتور را روی زاویه دلخواه تنظیم میکنیم.
Powered by Froala Editor